
Level: Big project (Bachelor's thesis)
GitHub Repository: --
What is a "NinjaCar"?
"Ninja Cars" are 1/8th scale robotic cars developed at the Autonomous Robotics and Perception Group (ARPG) at the University of Colorado Boulder. Throughout the years there have been several versions of this vehicle, as they needed to fulfill the requirements set by each researcher.During my stay at the ARPG laboratory, not only did I witness how one NinjaCar was modified (NinjaCar02). I was also able to build my own version of the car, so that it would suit my needs.
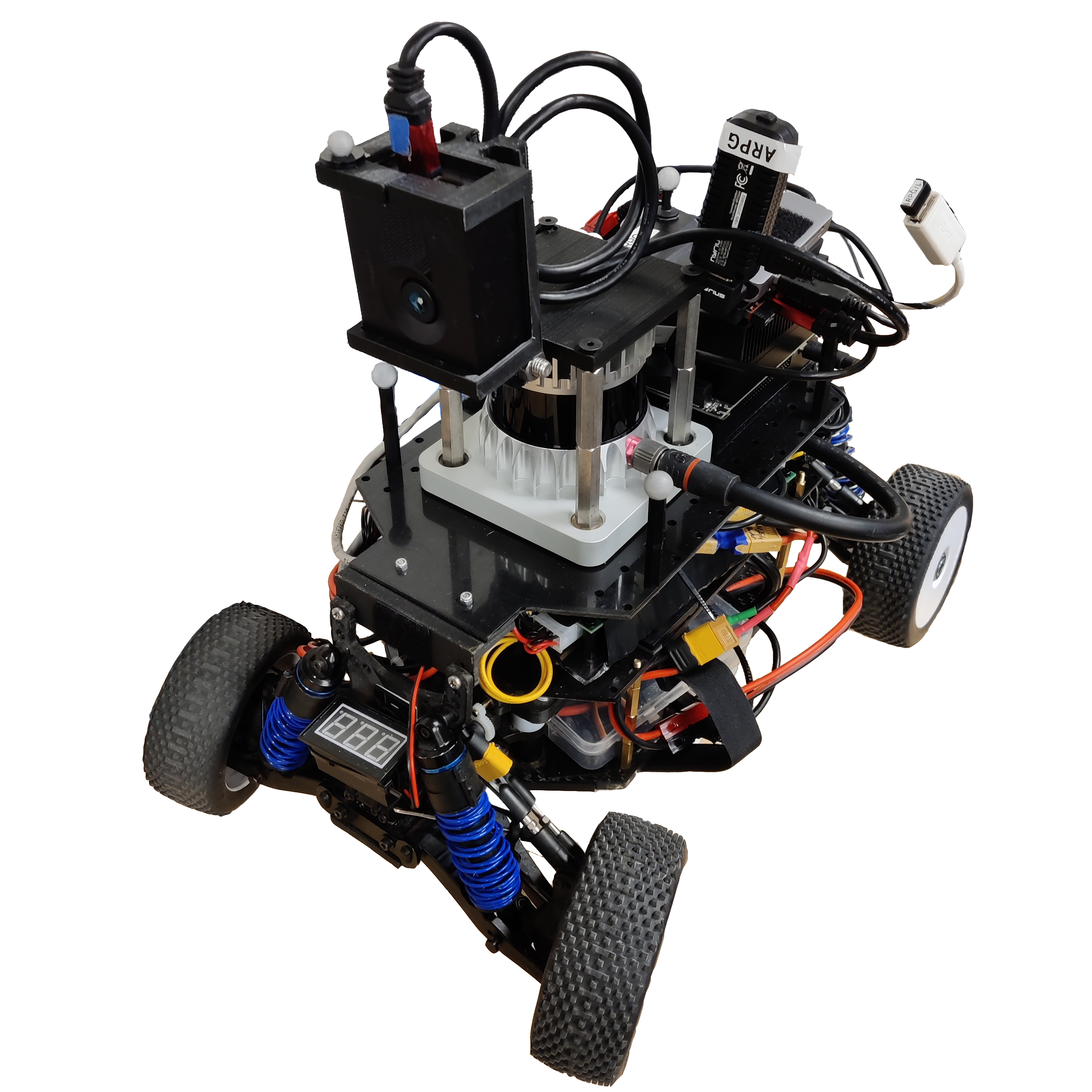
NinjaCar02:
The first version of the NinjaCar02 I worked with was capable of autonomous driving and map building.
- Autonomous Driving: By relying on the CarPlanner algorithm.
- Map building: By relying on an Intel RealSense camera.
However, the different projects that were working with the car required more sensors to be added, thereafter the final version that I worked on was much heavier and harder to maneuver:
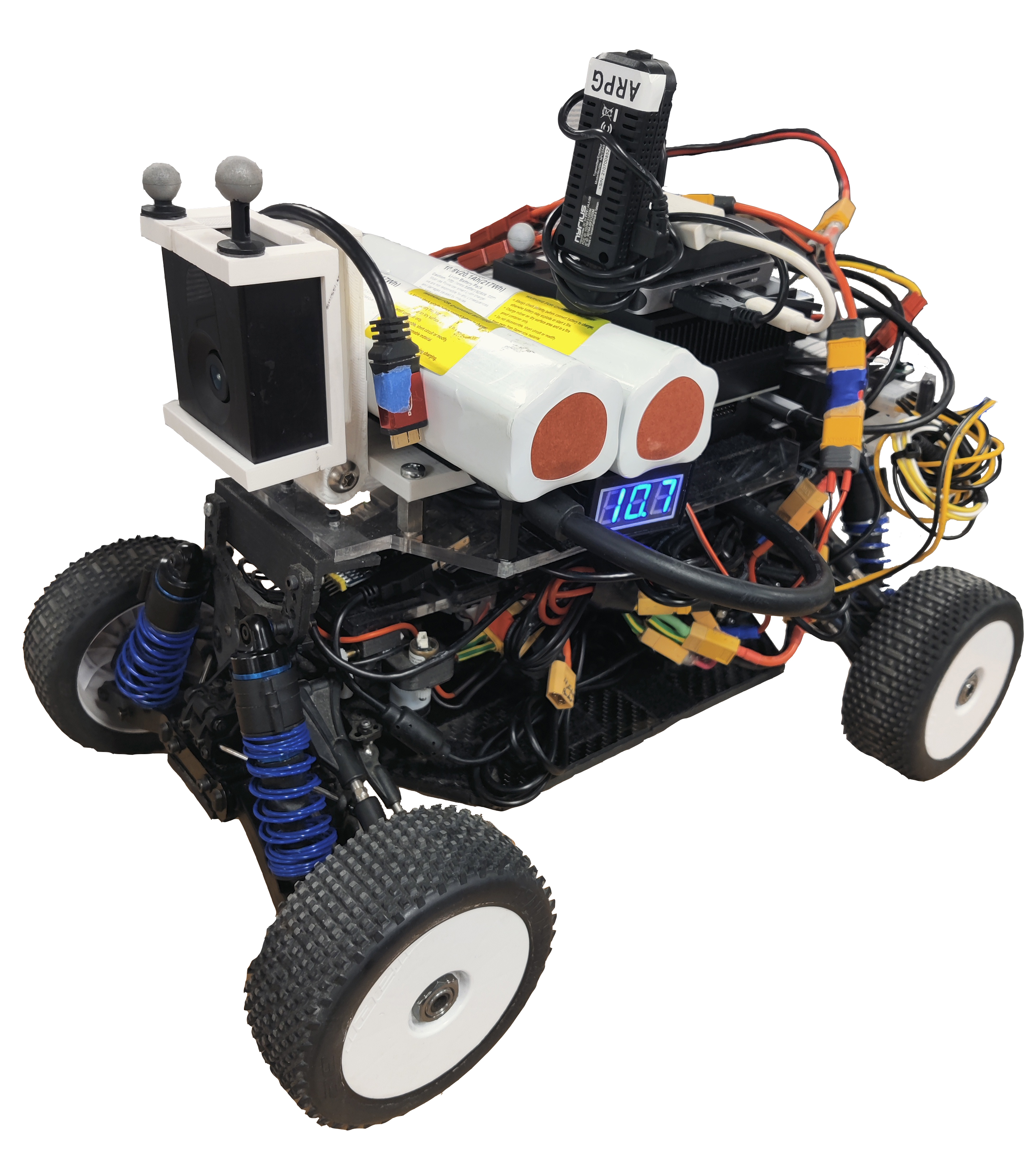
NinjaCar03:
Since the platform was being used so frequently, and had many more components than I actually needed, I created my own version of the platform:
NinjaCar03.
Electronic scheme:
The structure of the vehicle was supposed to remain similar to the one I had previously been working on (NinjaCar02). Thus avoiding compatibility issues. Only a few components were upgraded.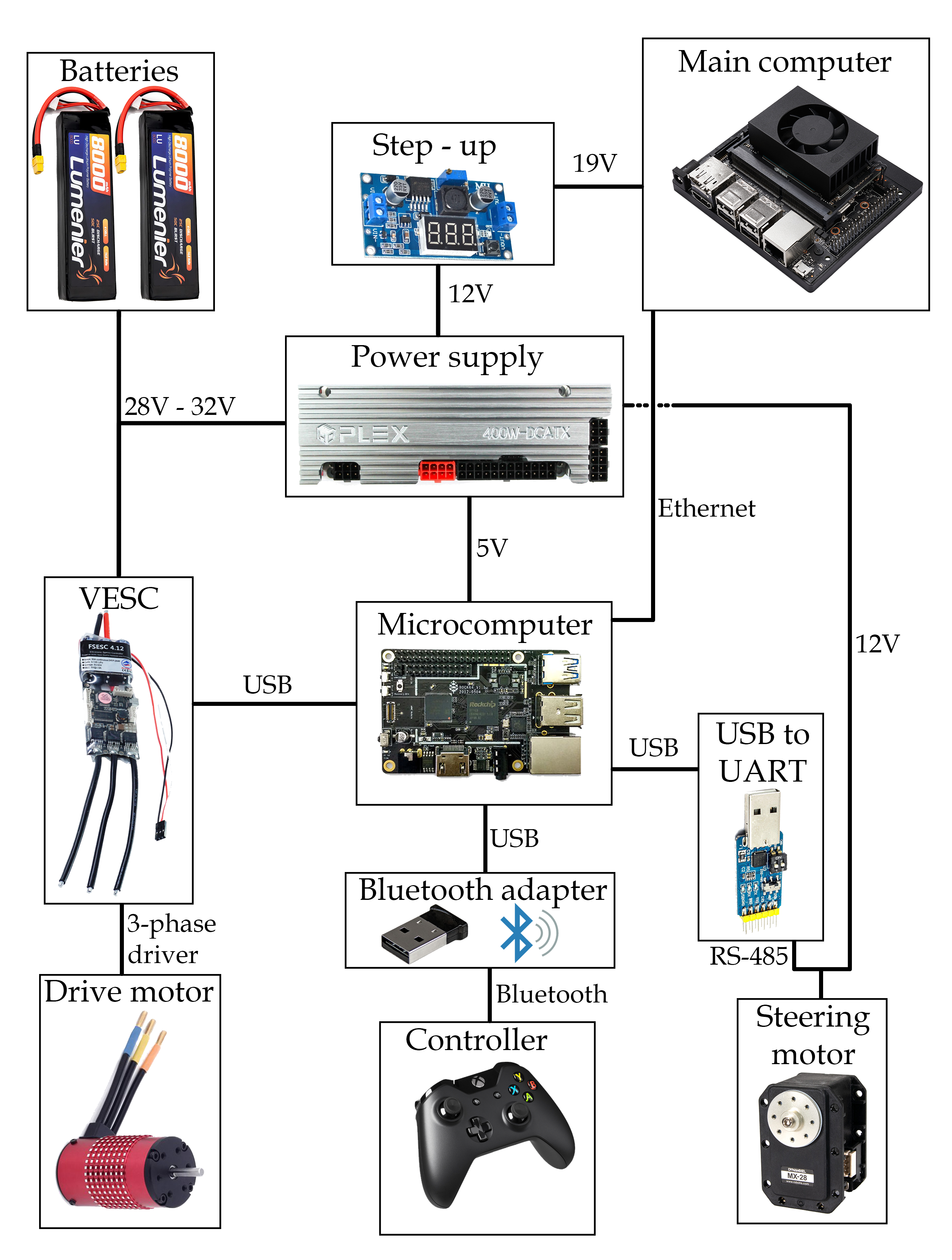
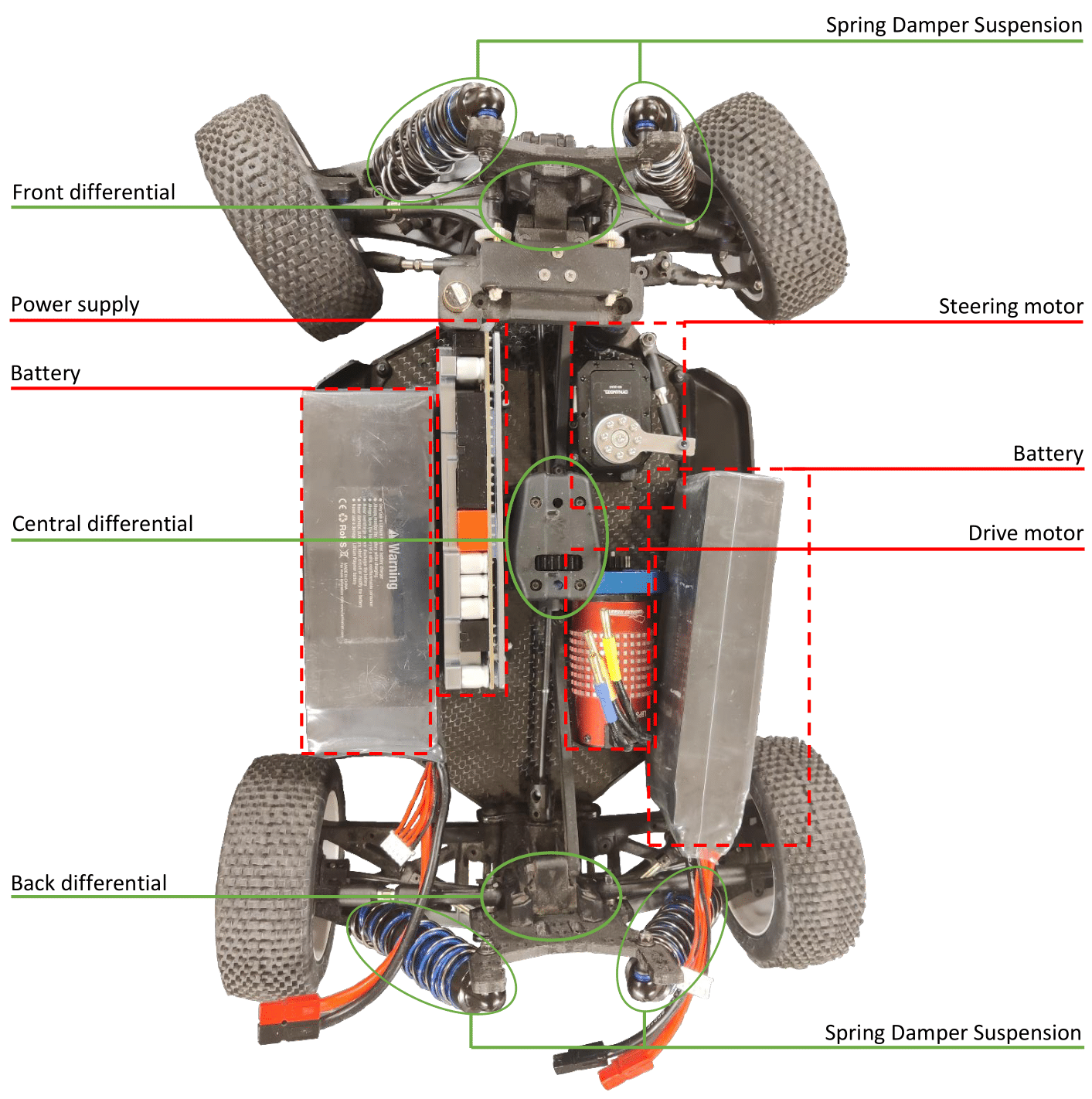
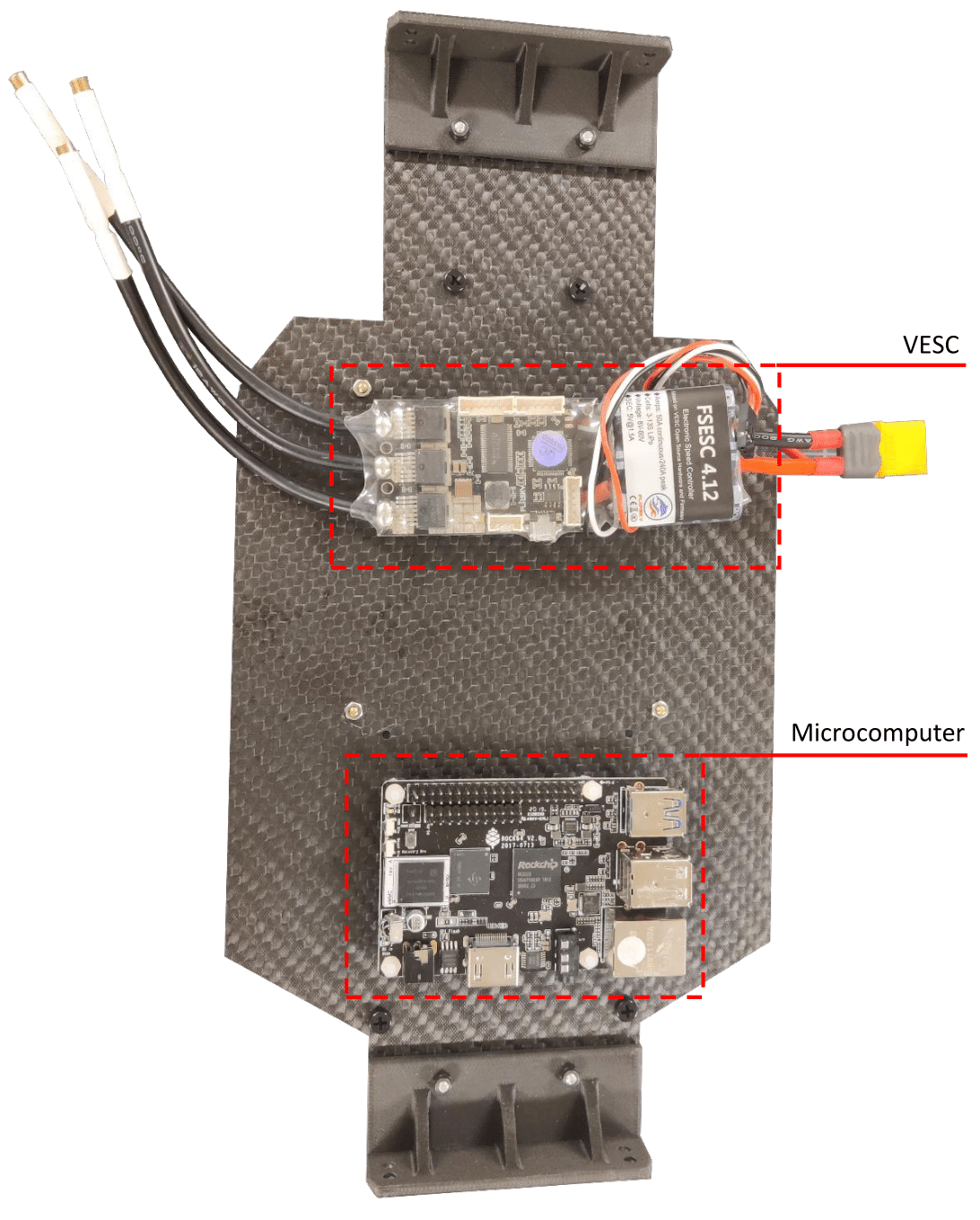
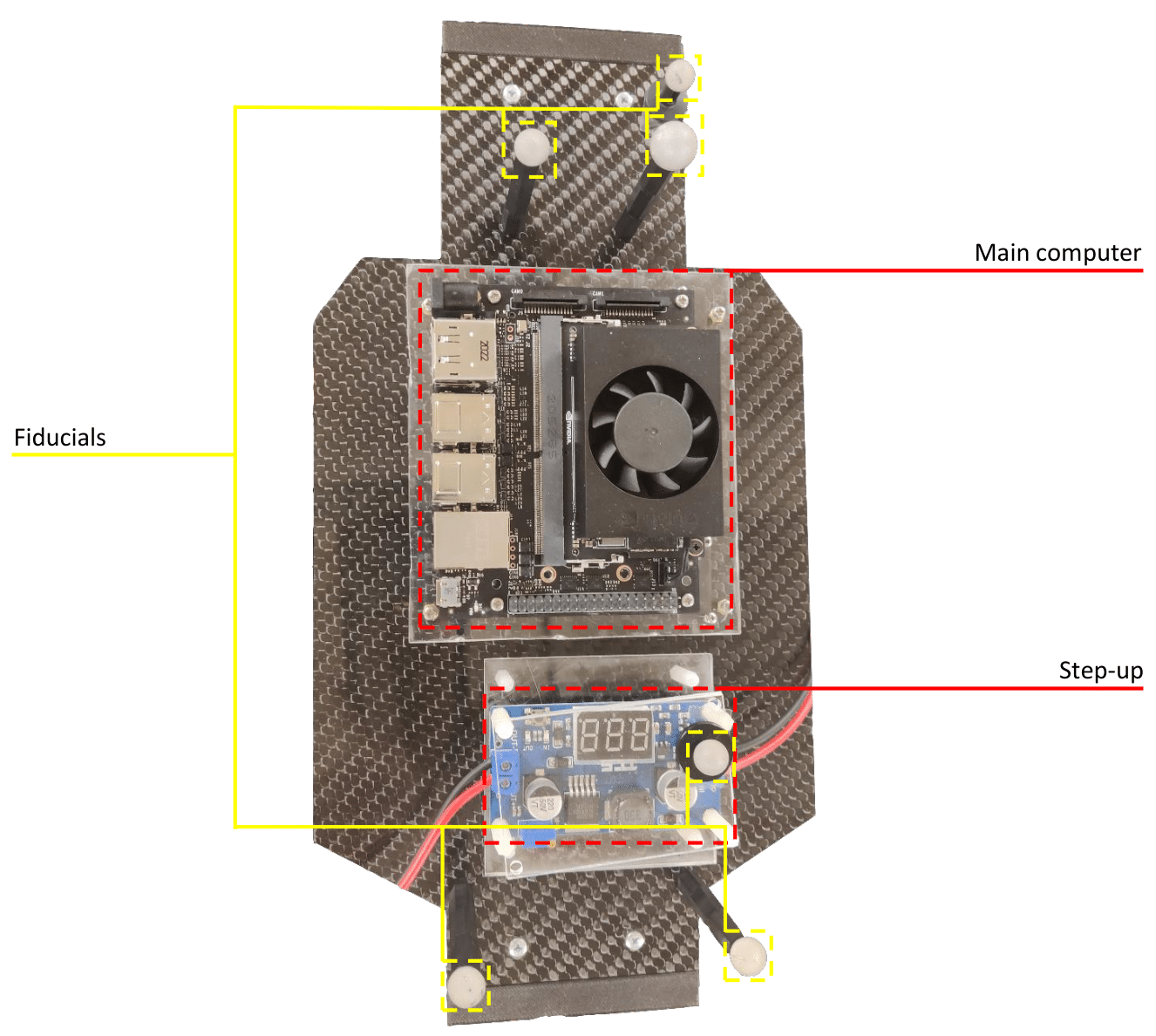
Part placing:
In order to improve the mobility of the vehicle, the center of gravity was kept as low as possible. This was achieved by placing the vast majority of elements in the lowest layer of the car, making sure the heaviest ones went there:
Final product:
The car that was obtained after this process weighted much less than the previous iteration. The change is visible:
NinjaCar02
NinjaCar03
The resulting car was capable of moving in an agile manner, which can be seen in the following video: